Join us for a behind-the-scenes look at the development of our ABB cobot demo at ATX West 2024 in Anaheim, CA. We sit down with Automation Controls Engineer, Chace Hutchins, to learn how he approached the programming of this interactive cobot that won the hearts (and business cards!) of visitors to our trade show booth.
ENGINEERING GROUP
EXPERTISE
ROBOT DEMO OBJECTIVE
"This build was one of two robot demonstrations in AC’s booth this year at ATX West 2024, in Anaheim, CA.
We wanted to highlight our partnership with ABB and our role as an integrator and authorized ABB Value Provider.
Our team wanted to create a fun, interactive demonstration with a sharp-looking takeaway. So, we decided to build an automated cobot system that would engrave a scanned image of a visitor’s business card onto a red, anodized aluminum card.
But we knew this kind of demo would require the support of multiple technologies to be successful. With the help of our partners, we engineered a solution that was a hit at the trade show."

"ABB’s GoFaTM CRB 15000 cobot was the automation centerpiece for this build. ABB cobots provide safe interactions with humans without guarding coupled with world-class precision performance, so the GoFaTM was a perfect fit.
We also turned to TRUMPF, a laser technology innovator, to develop the central engraving theme for the demonstration. They shared a TruMark 5010 One-Box Laser and workspace to help us complete the engraving platform.
Keyence, a longtime channel partner, loaned us their AI-enabled vision camera to take high-resolution images of visitor business cards used for the engraving.
This was a highly collaborative demo – hats off to these invaluable partners for helping us realize this vision!"
EXPLORE
Learn more about ABB in our recent blog: Precision Automation Engineering with ABB Robotics
RESOURCE CREDIT: ABB | New GoFaTM CRB 15000
"Sure, here’s what happens during the demo:
We start by placing a business card onto the first empty card nest (A).
Our ABB GoFaTM CRB 15000 collaborative robot (B) positions a specially designed vacuum end-of-arm-tool (EOAT) on the business card to pick it up from the nest.
The cobot spins around to present the front of the card to the laser scanner. Our Keyence VS-1500cx Smart Vision Camera (C) captures a high-resolution image of the business card and sends the data to the laser machine.
The cobot discards the business card through a slot (D) in the table.
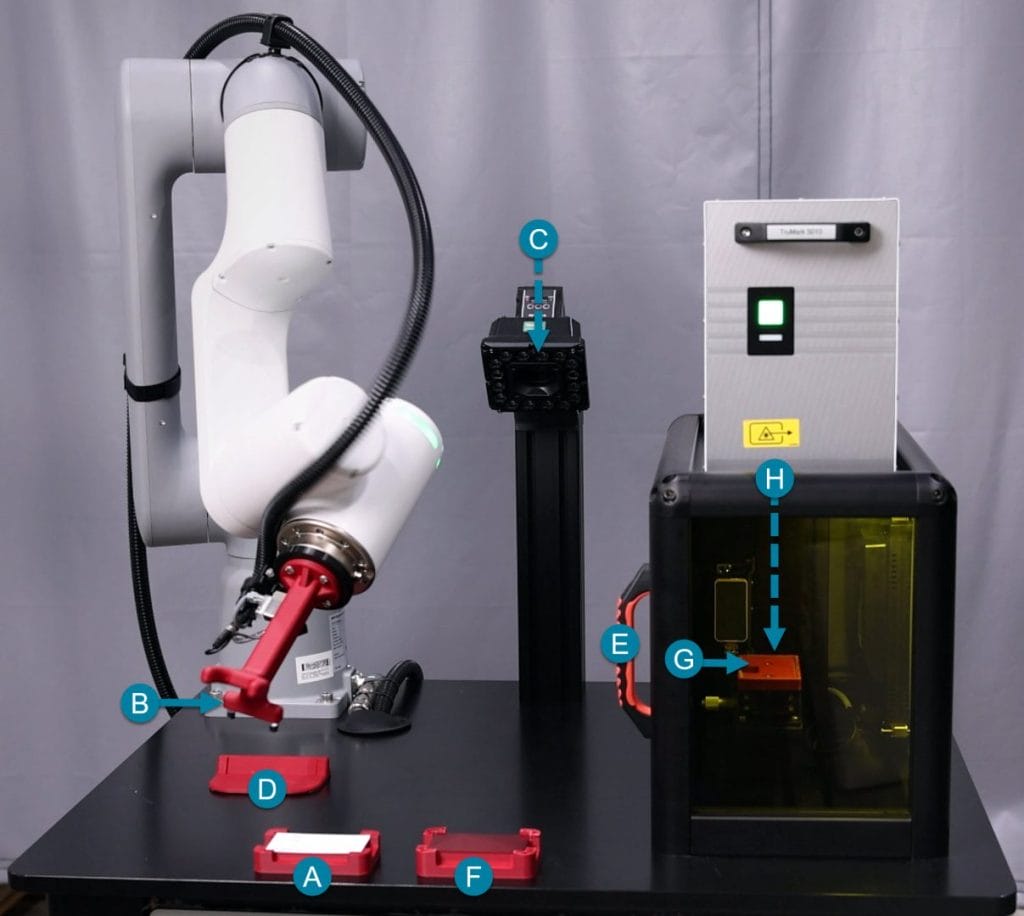
The cobot moves to the laser engraving chamber and uses its EAOT gripper to slide the interlock door open (E).
Moving to a second nest, (F) the cobot retrieves one of the red, anodized aluminum cards using its vacuum EOAT.
The cobot inserts the blank card onto a third nest inside the laser engraving chamber (G), then retracts its arm and uses its EOAT gripper to close the safety interlock door.
Our Trumpf TruMark 5010 One-Box Laser uses the scanned business card data from the camera to engrave the image onto the nested aluminum card (H).
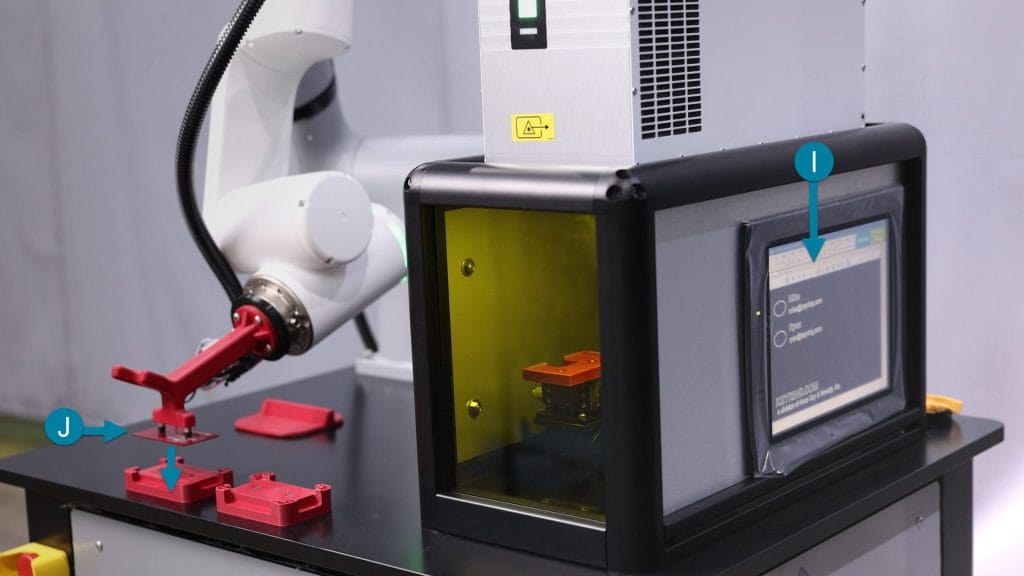
A monitor mounted on the right side of the chamber (I) displays the image that is being engraved.
When the laser stage is complete, the cobot opens the interlock door, retrieves the engraved card, closes the door, and places it on the first card nest. (J)"

"Since it was a live demonstration, we needed the scan-and-engrave process to work smoothly and quickly and handle nearly anything that we threw at it.
This required investing a bit more time into the data processing steps to generate each new laser-engraved business card:
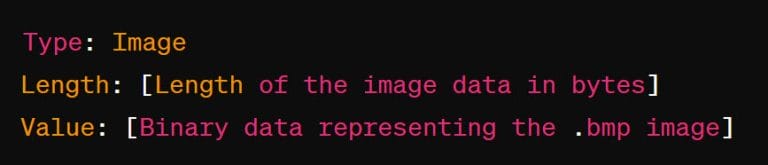
"The challenge was not only figuring out the specific commands needed to build a job from scratch with a new image every cycle, but also the specific hexadecimal conversions needed for each Tag, Length, and Value components of each command. These varied in length and value depending on parameters needed for the command.
For example, the sequence of commands was: Close Shutter, Create New File, Set Laser Parameters, Add Bitmap, Save File, Load File, Open Shutter, Mark. Each of those commands varied with distinct Tags, and depending on the Values, the Length had to match.
Tag and Length were converted to Integer to Hex, but the Value was ASCII to Hex. To overcome the challenge, I had to discover the specific contents for each command. Next, I had to convert them appropriately to Hex. Then, I used my unchanging paths so that the process was the same every time, even though the image added was different."

"We had a steady line of visitors, customers, vendors, and partners checking out the demonstration and getting their business cards engraved. There were even handmade drawings and other images folks asked us to scan so they could participate and get the engraved takeaway.
Even though we had high expectations, I think it’s safe to say that our ABB cobot automated engraving system far exceeded the performance we hoped for!
On behalf of AC, I want to thank ABB, TRUMPF, and Keyence for partnering with us! It was a great engineering collaboration and a fun interactive experience for our trade show visitors and AC team as well.
Check out the timelapse video below of our build, including a view of the demo at the trade show. We hope you enjoy it!"

VIDEO ABOVE: ABB Cobot Laser Engraver in Development
AC’s ABB Cobot Engraver Timelapse for ATX West 2024
AC is an ABB Value Provider supporting robots, cobots, and other integrated technologies. How can we automate the impossible for your unique application?
Special thanks to AC contributors: Timelapse configuration courtesy of AC Automation; behind-the-scenes robot video and photo assets captured by Chris Jaramillo, AC Technical Writer; trade show video footage and photo assets captured by Lindsay Fritz, AC Marketing Manager; video editing by Francesca Weeks, AC Sr. Technical Writer.a